
G25/G27ペダルの修理に定番の電子ボリュームを使うことにした。
センサテック ELV-1605
検出角度が±15度の ELV-1605HI と、±60度の ELV-1605HD がある。
G27ペダルにはHIがいいらしいけど、うちのペダルは物理的に60度くらい回してるので、ELV-1605HDのほうを買いました。専用のコネクタハーネスSZH-3-300も一緒に。
ボリュームの接続先インターフェースは定番の Leo Bodnar Ultra Precision Joystick Controller BU0836A だよ。
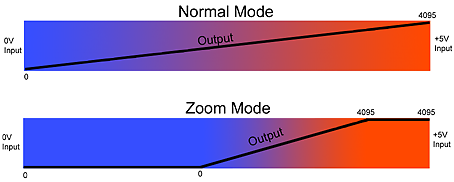
BU0836Aのスーパー賢い機能 "ZoomMode" が、実にレースシム向き。詳しい説明は公式サイトを見てね。
これについてアバウトな図を元に計算する。
だいたい2.2~4.2Vの範囲が12bit4096解像度(0~4095)にズームされるんだね。
output=4096/2*(volt-2.2) (2.2<volt<4.2)
一方、ELV-1605HDは回転角120度を1~4Vで出力する。
volt=deg/120*3+1 (0<deg<120)
つーことで、ELV-1605HDとBU0836A(ZoomMode)で表現可能な範囲は計算すると、
角度:48~120度(有効範囲72度)
出力:0~3686(2.2~4V)
50度くらいの範囲で使いたいと思ってたんで、そうすると2500解像度くらい。
これだけあれば十分だ。ちょうどいいな!!
電気的な接続は、専用ハーネスの先端に3連QIコネクタ(バラ売りだと1組50円くらい)をかしめただけ。
そしてペダル側のボリューム取り付け穴をステップドリルで10mmに拡大。切削面は油性ペンで塗って気休め錆防止しておいた。穴拡大から面取りまで一発でできるステップドリルは便利だなぁ。いろいろ穴あけをするシムコクピオーナーは持っておきべき。
あとはその穴にボリュームを取り付けて調整して完成。かんたん。
動かしてみたら、ペダルの出力が2400解像度くらいになった。計算どおり!!
使ってみた結果、いまのところド安定。うごきも滑らかで微妙なペダル操作にもキレイに追随する。アナログ可変抵抗よりフリクション少ないしいい感じ。
これでアナログボリュームの出力ピクプク現象ともおさらばだ!!










{kind=link}
0 コメント:
コメントを投稿